EtherCAT运动控制器(三) 基于PLC实现多轴直线插补的技术开发详解
在现代工业自动化领域,多轴协同运动控制是实现复杂加工轨迹、提升生产效率的关键。EtherCAT以其卓越的实时性和拓扑灵活性,已成为高端运动控制系统的首选总线协议。本文将深入探讨如何基于PLC(可编程逻辑控制器)平台,结合EtherCAT运动控制器,实现高效、精确的多轴直线插补功能,涵盖从技术原理到软件开发的完整路径。
一、 核心概念:EtherCAT与直线插补
- EtherCAT运动控制器:它作为从站设备,直接连接伺服驱动器,负责接收主站(通常是PC或PLC)的运动指令,并高精度地控制电机位置、速度与扭矩。其内部集成了强大的运动控制算法(如插补、位置环等),通过EtherCAT总线实现微秒级的同步通信。
- 直线插补:指控制两个或两个以上的运动轴,使其按照设定的速度,从当前位置同步、线性地运动到目标位置。在多轴空间中,这表现为工具末端沿一条空间直线轨迹运动。这是CNC加工、机器人抓取等应用的基础功能。
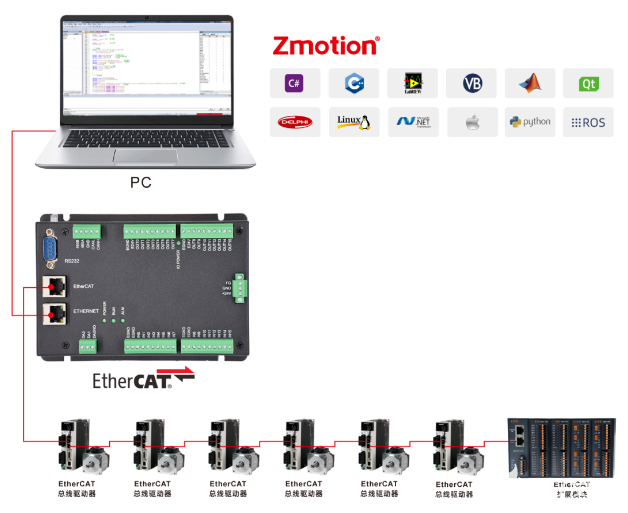
二、 系统架构与数据流
典型的基于PLC的实现架构如下:
- 主站(PLC):采用搭载EtherCAT主站协议的PLC(如倍福TwinCAT、Codesys Runtime、三菱/欧姆龙的高端型号等)。它作为总线的“大脑”,负责:
- 逻辑控制:处理工艺流程、安全联锁等。
- 路径规划:根据加工任务,计算多轴直线插补的路径点、速度曲线。
- 指令下发:通过EtherCAT周期数据(PDO)将目标位置、速度等参数实时发送给各个运动控制器从站。
- 从站(EtherCAT运动控制器):每个控制器管理一个或多个伺服轴。它接收主站的指令,并执行:
- 本地闭环控制:进行高频率的位置环、速度环、电流环控制。
- 插补同步:严格遵循主站发出的同步时钟(DC,分布式时钟),确保所有轴在精确的同一时刻启动、停止和运行,这是实现高精度直线轨迹的关键。
- 数据流:在一个通信周期内(通常为1~2ms),PLC主站将计算好的各轴下一周期的目标位置写入对应的PDO,并通过EtherCAT帧广播出去。各运动控制器在帧经过时“On the Fly”读取属于自己的数据,并立即执行。各控制器也将实际位置、状态等反馈数据写入帧,供主站读取,形成闭环。
三、 PLC软件实现的关键步骤
在PLC编程环境中(以IEC 61131-3标准的CoDeSys平台为例),实现多轴直线插补通常遵循以下步骤:
- 硬件组态与网络配置:
- 在IDE中扫描并添加EtherCAT主站设备。
- 通过ESI文件导入或自动扫描,将所有的EtherCAT运动控制器从站添加到网络拓扑中。
- 配置分布式时钟(DC),确保主站与所有从站的时间严格同步。
- 映射过程数据对象(PDO),定义主站与每个运动控制器之间交换的输入(如实际位置、状态字)和输出数据(如目标位置、控制字)。
- 轴参数配置与调试:
- 为每个物理轴创建对应的软件“轴”对象(如
AXIS_REF)。
- 配置电机与负载的详细参数(电子齿轮比、行程限位、回零方式等)。
- 通过在线调试功能,逐一进行伺服使能、回零操作,确保单轴运行正常。
- 多轴直线插补编程:
- 使用封装好的功能块:这是最常用和高效的方式。例如,在CoDeSys的Motion Control库中,直接调用
MC<em>MoveLinear或MC</em>MoveLinearRelative功能块。
- 功能块参数设置:
AxisGroup:指定参与插补的多个轴构成的组。
Execute:触发运动的布尔信号。
Position/Distance:在空间坐标系中指定的绝对目标位置或相对位移(对于XYZ三轴,这是一个三维向量)。
Velocity,Acceleration,Deceleration:设定轨迹的速度曲线。
BufferMode:决定如何衔接连续的运动指令(立即、顺序、混合)。
- 编程逻辑:在PLC的程序组织单元(POU)中,根据工艺逻辑,在适当的时候(如收到启动信号、上一步完成)置位
Execute管脚,并填入目标坐标和速度参数,即可启动一次多轴直线插补运动。
- 路径规划与前瞻处理:
- 对于连续的线段轨迹,为了获得平滑的速度曲线和更高的加工效率,需要在PLC中实现或调用路径前瞻算法。该算法会预先读取一段程序中的连续移动指令,进行速度优化,自动在拐角处进行速度衰减,避免冲击和过冲。高级的PLC运动控制库通常集成此功能。
- 状态监控与错误处理:
- 实时读取各运动控制器返回的
StatusWord、ErrorCode和实际位置。
- 在程序中实现完善的错误处理逻辑,如伺服故障时触发安全停止、报警并记录日志。
四、 技术开发要点与挑战
- 实时性保障:确保PLC任务周期与EtherCAT通信周期稳定且匹配。运动控制任务应放在最高优先级的循环任务中。
- 同步精度:正确配置和使用分布式时钟是消除轴间跟随误差、保证直线轨迹精度的基石。
- 坐标系管理:对于复杂系统,需要在工件坐标系、工具坐标系和机器坐标系之间进行灵活转换和编程。
- 性能优化:合理设置通信周期的长度(在满足控制精度的前提下尽可能短),优化PDO映射以减少数据量,提升系统响应速度。
- 选型匹配:确保PLC主站的EtherCAT主站性能、运动控制库功能与运动控制器的能力(如支持的最大轴数、插补模式)满足项目需求。
五、
通过将强大的EtherCAT运动控制器与灵活通用的PLC平台相结合,开发者能够构建出高性能、高可靠性的多轴直线插补系统。其核心在于利用EtherCAT的硬实时通信能力,将PLC的路径规划优势与运动控制器的本地闭环控制优势深度融合。掌握从硬件组态、网络配置到软件编程(特别是标准运动控制功能块的使用)的全流程,是成功实施此类技术开发的关键。随着软PLC和基于PC的控制技术的普及,这一方案正变得越来越开放和高效,为智能制造提供了坚实的运动控制基础。
如若转载,请注明出处:http://www.fen-fan.com/product/65.html
更新时间:2026-07-31 16:29:55